3D печатный протез с тактильными датчиками
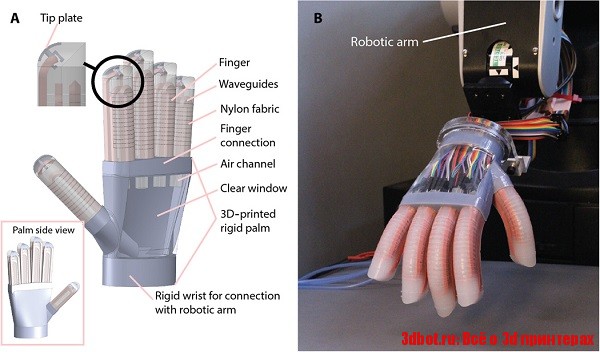
Идея оснащения роботов-манипуляторов тактильными датчиками сама по себе не нова, однако продемонстрированное решение вполне уникально и отличается повышенной гибкостью во всех возможных смыслах. Исследователи на стали покрывать датчиками поверхность манипулятора. Вместо этого в руку с эластомерной оболочкой ученые встроили оптические волноводы. Конструкция изготовлена с помощью 3D печати и мягкой литографии.
«Мы печатаем формы для оптических волноводов на 3D-принтере Objet 30, использующем технологию PolyJet. Производственный процесс генерирует шероховатости размером 6 нм между центром волновода и внешним покрытием, что вызывает рассеивание и потери в яркости светового потока. С другой стороны, 3D печать обеспечивает свободу дизайна, необходимую при работе над сложными сенсорными конструкциями», – указывается в докладе.
Волноводы играют роль искусственных нервов, а давление определяется за счет изменения яркости светового потока при деформации пальчиков. Остается лишь отслеживать колебания и сравнивать получаемые данные, чтобы определять жесткость ощупываемых объектов и даже текстуру их поверхностей.
«Большинство роботов на сегодняшний день оснащаются наружными сенсорами, позволяющими улавливать присутствие объектов поверхностью аппарата. В нашем же случае датчики установлены внутри, что позволяет оценивать нагрузки, передаваемые через толщу конструкции робота – примерно так, как это происходит в людях и других организмах, испытывающих боль», – поясняет докторант Хуэй Чан Жао.
В протезировании же такие технологии могут помочь не просто манипулировать предметами, но и восстанавливать чувство осязания, открывая дорогу бионическим протезам принципиально нового уровня.
>>>АРХИТЕКТУРНЫЕ МАКЕТЫ. УЛИЧНЫЕ МАКЕТЫ ЗДАНИЙ<<<




Добавить комментарий
Для отправки комментария вам необходимо авторизоваться.