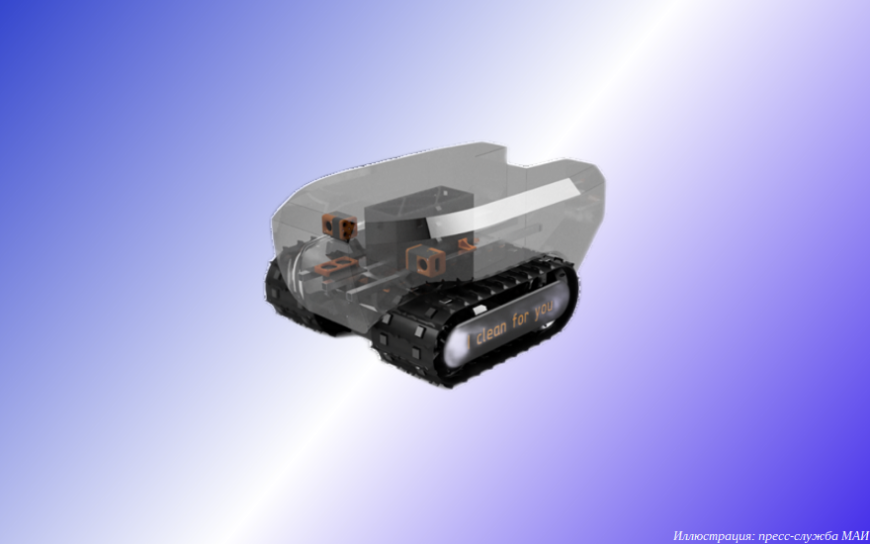
Команда молодых инженеров Московского авиационного института презентовала усовершенствованный прототип гусеничного беспилотного уборщика для автоматической очистки территорий. 3/4 деталей робота напечатаны на 3D-принтере.
Роботизированный комплекс состоит из группы беспилотников, сервера и станции подзарядки. По замыслу конструкторов, конечная цель проекта — повсеместное внедрение разработки для полной замены человеческого труда машинным, что позволит снизить расходы на персонал, увеличить качество поддержания чистоты за счет непрерывной очистки территорий от снега, листвы, грязи, мусора и пыли.
«На сегодняшний день наша разработка является уникальным решением на мировом рынке. Мы создаем гибкую систему, способную в автономном режиме координировать работу целой группы уборщиков», — рассказал студент третьего курса кафедры цифровых технологий и информационных систем Виталий Попов.
На сегодняшний день команда завершила разработку усовершенствованного гусеничного беспилотника. Сейчас он состоит из трех частей — гусеничной ходовой базы, корпуса с навесным оборудованием для проведения уборочных работ и верхнего модуля с системой управления. В будущем планируется добавить систему управления на базе искусственного интеллекта, лидары для распознавания объектов на расстоянии, датчики фиксации различных показателей, камеры дневного и ночного видения, модуль связи. Энергию беспилотник получает от литий-ионного аккумулятора, рассчитанного на работу в течение пяти-десяти часов. Шасси текущей версии выдерживает нагрузки до восьмидесяти килограмм. Часть нагрузки предполагается использовать для увеличения объема аккумуляторной батареи. Более восьмидесяти процентов деталей робота-уборщика, в том числе полимерный внешний корпус, напечатаны на 3D-принтере.
Схема работы довольно проста: система обрабатывает данные, полученные с каждого дрона, формирует полную картину загрязненности территории и местоположения беспилотников, после чего в режиме реального времени оптимизирует работу всей группы. При необходимости она может менять маршрут или отправлять робота на дополнительную уборку определенного участка, если первый выезд не дал должных результатов.
Опытный образец уже прошел ходовые испытаниях. К основным испытаниям конструкторы планируют приступить следующей осенью. Пока разработчики ориентируются на применение системы в частном секторе — очистке уличных территорий жилых комплексов, бизнес-центров, и так далее.
>>>АРХИТЕКТУРНЫЕ МАКЕТЫ. УЛИЧНЫЕ МАКЕТЫ ЗДАНИЙ<<<




Добавить комментарий
Для отправки комментария вам необходимо авторизоваться.